Business

Business
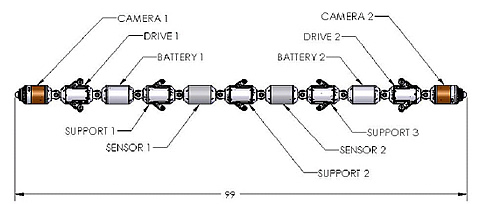
The goal of this project is to enhance the reliability and integrity of the Nation’s natural gas infrastructure through the development, construction, integration and testing of a long-range non-destructive evaluation (NDE) inspection capability in a modular robotic locomotion platform (Explorer II). The Explorer II will have an integrated inspection sensor (developed under a separate project) to provide enhanced in-situ, live, and real-time assessments of the status of a gas pipeline infrastructure. The Explorer II system will be capable of operating in 6-inch- and 8-inch-diameter, high-pressure (piggable and non-piggable) distribution and transmission mains. The system will also be enhanced to form an “extended” platform with additional drive and battery modules allowing the system the potential to carry alternative sensors that are heavier or more drag intensive than the current technology.

Carnegie Mellon University (CMU) - Pittsburgh, PA
Northeast Gas Association (NGA) - New York, NY
Southwest Research Institute (SRI) - San Antonio, TX
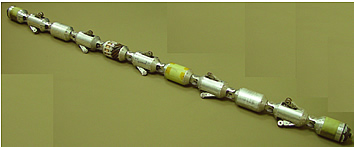
With an aging gas pipeline infrastructure, utilities face an ever-increasing need for more frequent inspections of the distribution network. At present, in the case of a leaking pipeline, the operator has to make a decision as to whether to spot or section repair a line and to reline it or replace it, based on in-situ evidentiary data (i.e., maps, historical repairs, leak surveys, corrosion data, etc.). Remote visual inspection holds promise to become the most effective method to assess internal pipe conditions. For this reason, the industry has concentrated resources to develop internal pipe inspection robots. Recognizing this need and the possibility of developing an advanced long-range, un-tethered gas main inspection system for in-situ assessment and pipe-network cataloging, CMU engaged in a study of potential configurations and technologies that could be integrated into such a robotic system. The result of this effort is Explorer, a real-time, remotely controlled, modular, visual inspection robot system for the in-situ inspection and imaging of live 6- and 8-inch diameter gas distribution systems. Using scripted routines and a combination of its onboard driving arms and steering joints, Explorer is designed to travel through straight pipe and pipe diameter reductions, as well as negotiate elbows, sharp bends, and tees. The system is sealed and purged, thus providing safe operation in natural gas environments, and is capable of negotiating wet and partially filled (i.e., water- or mud-filled) piping.
The current research builds upon a previous project in which CMU built and successfully tested the Explorer I robot. In June 2004, Explorer I was placed into a low-pressure, 8-inch gas main owned and operated by Con Edison in Mount Vernon, NY. The robot successfully inspected 2,150 feet of pipe that was originally installed in 1890. Cameras mounted on each end continually transmitted visual images to an external monitor over the wireless connection. On October 8, 2004, the robot successfully inspected a mile-long length of live natural gas distribution main in Brockport, NY.
Real-time inspection of live gas pipelines using advanced NDE sensors, currently not possible with traditional sensor transport methods, is a critical goal with the potential to dramatically increase the ability of industry to understand the state of their natural gas distribution systems. This technology has the potential to enhance the overall safety, reliability, and integrity of the natural gas infrastructure by providing a state-of-the-art tool for inspecting virtually all piping systems. Enhanced evaluation of piping conditions will more readily identify areas of concern, which can be corrected to minimize the chances of leak or rupture, reducing public and environmental risk and increasing the reliability of gas delivery to consumers.
Initiated in October 2004, this project focused on development of design and integration concepts. Accomplishments to date include the following:
Base X-II Platform (October 2004 – September 2007)
Extended X-II Platform (October 2007 – September 2008)
In 2006, the Explorer technology earned one of the prestigious R&D 100 Awards from R&D Magazine. The R&D 100 Awards are presented annually to the 100 most technologically significant products introduced into the marketplace over the past year.
All work under this project has been completed and is reportedin the final report which can be accessed from the Additional Information section below.

Funding
This project was initially awarded funding under cooperative agreement resulting from a Broad Agency Agreement solicitation. The initial award was made in September 2004.
$1,778,635
$625,486
NETL - Richard Baker (richard.baker@netl.doe.gov or 304-285-4714
CMU - Hagen Schempf (hagen+@cmu.edu or 412-268-6884)
Final Project Report [PDF-6.36MB]